Re-read 06 Lecture.pdf and 07 Lecture.pdf, but here’s my natural language interpretation of a subspace and basis.
A subspace is a subset of a vector space and acts as a vector space itself. If W is a subset (subspace) of V, the following properties must hold:
- , then (closed under addition)
- , then (closed under scalar multiplication)
Subspaces are defined by basis vectors, and the span (all linear combinations) of those form the subspace. So each element of the basis is linearly independent.
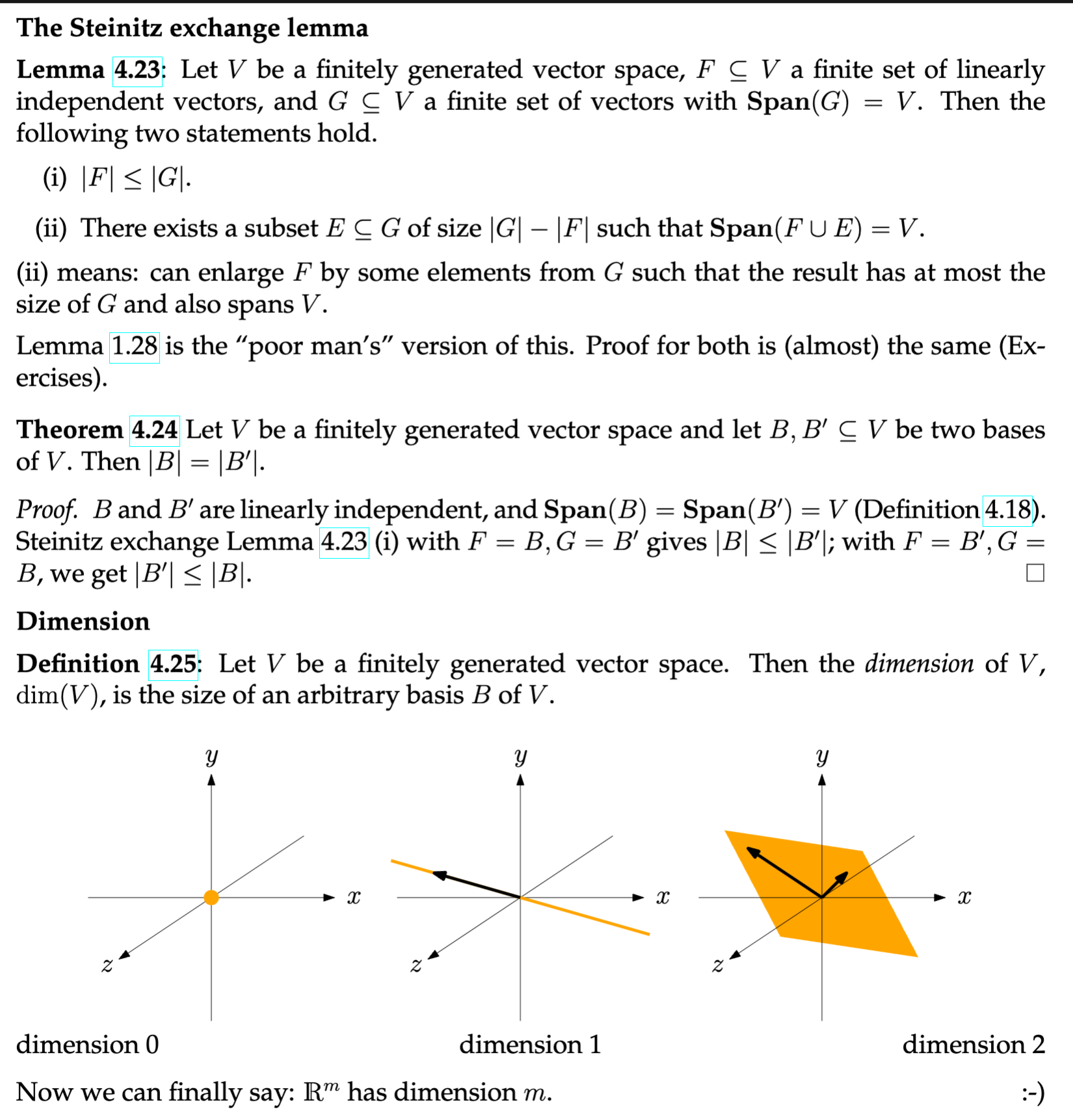
F.ex. in , we could f.ex. have these types of subspaces:
- the zero vector (a point)
- a line through the origin
- a plane through the origin (2d subspace)
- all of 3d space (needs three lin. indep. vectors as a basis)
The dimension of a vector space , denoted ,
is the size (number of vectors) of any basis of .
Examples
| vector space | basis |
|---|---|
| (subspace of ) | independent columns of |
| symmetric matrices (subspace of ) | |
| (polynomials) | (infinite set) |
| (smallest vector space) | (empty set) |
Definitely read and learn 07 Lecture.pdf.
Steinitz Exchange Lemma
all bases of a vector space have the same size.
Let be a finitely generated vector space,
and suppose we have:
- : a finite linearly independent set,
- : a finite set of vectors that span .
(i)
(ii) There exists a subset of size such that
You can enlarge the independent set by adding some elements of (but not too many) so that together they still span .
Exchanging Basis
Let be a finitely generated vector space,
and be two bases of .
Then:
Proof:
- Both and are linearly independent and both span .
- By part (i) of the Steinitz lemma:
- Swapping the roles (using as and as ):
- Combining both gives .